

El fГєtbol es un juego de equipo. ВЎClaro!, no cabe ninguna duda. “Uno para todos, todos para uno”, o como se dice en Alemania, “11 amigos deben ser.” Es evidente que la defensa debe de cooperar con los jugadores del campo medio y ellos a su vez con los delanteros. Y no sГіlo eso, los sistemas modernos del fГєtbol son aГєn mГЎs flexibles y dependiendo de la situaciГіn que se presente en la cancha, los defensas podrГan jugar un papel importante en el ataque, y no son raras las ocasiones en que ellos mismos anotan goles. A su vez, los delanteros pueden tomar temporalmente el papel de la defensa. Esta flexibilidad requiere que los jugadores “sientan” en cierta forma lo que estГЎn haciendo sus compaГ±eros; sobre todo, deben intuir quГ© es lo que harГЎn en el siguiente instante para poder actuar de manera Гіptima en beneficio del equipo.
Evidentemente, cada integrante del equipo juega de manera distinta a sus compaГ±eros, pero lo hace en funciГіn estrictamente de lo que hacen los demГЎs. Actualmente esto lo muestra casi a la perfecciГіn la selecciГіn de EspaГ±a. TambiГ©n el equipo de Alemania optimiza en buena medida esta dinГЎmica colectiva, razГіn que les permitiГі ganarВ con un marcador de 4:0 el juego contra Argentina duranteВ el Гєltimo campeonato mundial, a pesar de que no contabanВ con jugadores tan brillantes como, por ejemplo, Lionel Messi o Carlos TГ©vez.
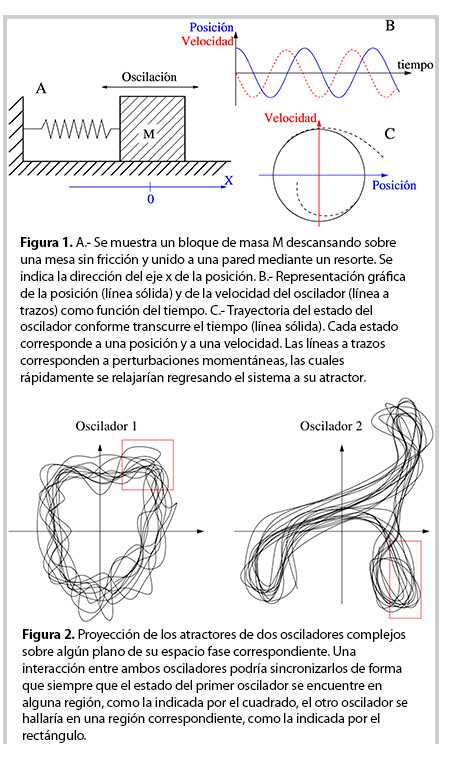
Los fГsicos estudian este tipo de fenГіmenos, a los cuales conocen como “sincronizaciГіn generalizada”, y los simulan numГ©ricamente conВ ecuaciones diferenciales acopladas.В Г‰stas son ecuaciones que relacionan a todas las cantidades que caracterizan al estado de un sistema en un momento dado con todas las cantidades que lo caracterizan en un tiempo anterior infinitamente cercano. La soluciГіn de estas ecuaciones suele mostrar oscilaciones irregulares, prГЎcticamente impredecibles. Para ilustrar cГіmo podemos entender algunas propiedades de estos osciladores complejos empezaremos con una descripciГіn grГЎfica de un oscilador simple, un bloque masivo que descansa sobre una mesa sin fricciГіn, sujeto mediante un resorte a un punto fijo.
Imaginemos que alguien jala el bloque de masaВ MВ queВ muestra la figura 1A una cierta distancia hacia el lado derecho, que designamos como la direcciГіn “x”-positiva, y lo suelta. Entonces, el resorte estirado jalarГa al bloque hacia la izquierda, haciГ©ndolo adquirir una velocidad de magnitud creciente. Eventualmente, el bloque llegarГa a su posiciГіn originalВ x=0, su posiciГіn de equilibrio. A pesar de que en ella el resorte dejarГa de jalar al bloque, Г©ste seguirГa su camino hacia la izquierda debido a suВ inercia,В comprimiendo ahora al resorte hasta que la fuerza, que ahora Г©ste ejercerГa hacia la derecha, lograra frenarlo. En esteВ punto de retorno, correspondiente a un valor negativo de la posiciГіnВ x,В la direcciГіn del movimiento cambiarГa y el resorte impulsarГa al bloque ahoraВ hacГa derecha. Esta secuencia se repetirГa y el bloque irГa y vendrГa de izquierda a derecha y de regreso, originando unВ comportamiento oscilatorio que seВ resume en la curva continua de la figura 1B, la cual muestra la coordenadaВ xВ del bloque conforme transcurre el tiempo.
Consideremos ahora la velocidad del bloque. Г‰sta tendrГa el valor cero al inicio. Al soltar el bloque Г©ste aumentarГa gradualmente la rapidez de su movimiento. Como se moverГa hacia la izquierda, es decir, hacia la direcciГіn negativa del ejeВ x, elВ signoВ de su velocidad durante esta fase del movimiento serГa negativo. La rapidez del bloque crecerГa hasta pasar por el puntoВ x=0, el punto de equilibrio, a partir del cual disminuirГa, el bloque se frenarГa, hasta llegar a cero en el punto de retorno. DespuГ©s la rapidez crecerГa de nuevo, pero ahora la velocidad serГa positiva, dado que el bloque se moverГa hacia la derecha, es decir hacia la direcciГіnВ xВ positiva. La curva a trazos de la figura 1B representa la evoluciГіn temporal de la velocidad. En la figura hemos ajustado las unidades de tal forma que los mГЎximos y mГnimos de las dos curvas estГ©n al mismo nivel.
Se nota que cuando la posiciГіn, mostrada por la curva contГnua, llega a sus valores extremos, a los puntos de retorno, la velocidad mostrada por la curva a trazos toma el valor cero, mientras que la velocidad encuentra sus extremos cuando el bloque pasa de ida o de vuelta por el punto de equilibrio, correspondiente a losВ cerosВ de la curva contГnua. Por lo tanto, si hacemos una grГЎfica en la cual cada punto indique unВ estado del sistemacaracterizado por la posiciГіn y velocidad del bloque en un instante dado, como muestra la figura 1C, al transcurrir el tiempo, dicho punto recorrerГa una trayectoria circular. Figuras como la 1C se conocen como laВ representaciГіn del oscilador en el espacio fase.
Hasta ahora supusimos que no hay fricciГіn ni ninguna otraВ influencia del entorno sobre el oscilador. Sin embargo, llegarГamos a las mismas conclusiones si analizГЎramos este oscilador en presencia de una fuerza de fricciГіn ademГЎs de una fuerza externa que actГєe periГіdicamente, como por ejemplo, si movieramos periГіdicamente hacia la izquierda y derecha la pared que muestra la figura 1A al lado izquierdo del resorte. TambiГ©n en este caso, una grГЎfica de la posiciГіn contra la velocidad del bloque formarГa un cГrculo cuyo radio estarГa determinado por la frecuencia de la fuerza externa, la elasticidad del resorte, el valor de la masa del bloque y la disipaciГіn debida a la fricciГіn. Es mГЎs, si se perturbara en cierto momento al oscilador causando desviaciones respecto a su movimiento circular, como las ilustradas por las lГneas interrumpidas en la figuraВ 1C, el oscilador regresarГa rГЎpidamente al cГrculo. Se dice, que el cГrculoВ atrae a las trayectorias del sistema en el espacio fase, o bien, el cГrculo es elВ atractorВ del sistema.
Como se mencionГі arriba, los osciladores complejos se describen matemГЎticamente a travГ©s de ecuaciones diferenciales acopladas. La soluciГіn de estas ecuaciones no es un nГєmero, como ocurre con ecuaciones algebraicas, sinoВ funcionesВ que describen la evoluciГіn temporal del sistema. Para el caso del oscilador armГіnico, las soluciones son las curva contГnua y a trazos de la figura 1B, es decir, la posiciГіn y velocidad del bloque como funciГіn de tiempo. Entonces, resolviendo las ecuaciones se puede descubrir el atractor del sistema. El atractor de un sistema es un objeto caracterГstico del mismo. Si dos sistemas tuviesen el mismo atractor, su dinГЎmica, es decir, su evoluciГіn conforme transcurre el tiempo, estarГa regida por las mismas ecuaciones diferenciales y matemГЎticamente los dos sistemas serГan equivalentes. Por ejemplo, el oscilador formado por una bloque y un resorte y un pГ©ndulo formado por una masa colgada de un hilo son sistemas matemГЎticamente equivalentes para oscilaciones de pequeГ±a magnitud. Si Ud. mostrara un atractor de cierto sistema con forma de cГrculo o de elipse a un fГsico, de inmediato Г©l le dirГa que el sistema correspondiente es un oscilador armГіnico.
Los atractores de osciladores complejos son usualmente objetos enВ un espacio fase de muchas dimensionesВ y su forma puede ser mucho mas complicada que un simple cГrculo (para una explicaciГіn simple de los espacios de muchas dimensiones, el lector podrГa ver los carteles de la exposiciГіnВ Laberintos CoordenadosВ del Dr. Luis MochГЎn, disponibles en la pГЎginaВ http://bit.ly/kPq4WP, y en particular, el cartel 2,http://bit.ly/13H3SYc). En la figura 2 se muestra una caricatura de cГіmo podrГa verse el atractor de dos osciladores complejos si se les proyecta sobre un plano.
Supongamos ahora que ponemos a los dos osciladores en cierto contacto de manera que interactГєen entre sГ, es decir, que cada sistema tenga alguna influencia sobre el otro. Imaginamos que hacemos el siguiente experimento. Escojamos una regiГіn cualquiera en el atractor del oscilador 1, como por ejemplo, la regiГіn marcada por el cuadrado arriba a la derecha, y midamos los tiempos en que el estado del oscilador 1 se encuentre dentro de dicha regiГіn. Si la interacciГіn entre los dos osciladores fuese suficientemente fuerte, ocurrirГa el fenГіmeno deВ sincronizaciГіn generalizada, en cuyo caso, se observarГa que el estado del oscilador 2 se encontrГa durante esos tiempos tambiГ©n dentro de cierta regiГіn de su atractor, por ejemplo, el rectГЎngulo abajo a la derecha. Esta sincronizaciГіn no dependerГa de la elecciГіn de la primera regiГіn, la cual hicimos de manera arbitraria. PodrГamos haber elegido cualquier otra regiГіn encima del atractor 1 y a ella corresponderГa alguna otra regiГіn del atractor 2, de forma que coincidirГan los tiempos durante los cuales los estados de cada oscilador se hallasen en sus respectivas regiones.
Los dos osciladores podrГan ser muy diferentes, la dimensiГіn y la geometrГa de sus atractores podrГan diferir, asГ como el comportamiento de ambos sistemas, y sin embargo, no actГєan de manera independiente. La dinГЎmica de uno puede estar relacionada fuertemente con la dinГЎmica del otro y viceversa. Intuitivamente, puede esperarse que la probabilidad para que ocurra el fenГіmeno de sincronizaciГіn generalizada serГЎ mayor cuando las frecuencias con las cuales ambos osciladores recorren su respectivo atractor seanВ parecidas. Esta Гєltima observaciГіn es crucial para el planteamiento y la discusiГіn de los resultados de un experimento que describiremos en la segunda parte de este artГculo, en el cual aplicamos los conceptos discutidos en este artГculo para estudiar el fenГіmeno de sincronizaciГіn generalizadaВ con equipos de futbol en Alemania.
Una versiГіn corta de Г©ste artГculo se publicГі en el Hypatia No. 45В www.hypatia.morelos.gob.mx.
ArtГculo publicado originalmente “Orquestando un equipo de fГєtbol. Parte 1: Las bases matemГЎticas” en el periГіdico UniГіn de Morelos por miembros de la Academia de Ciencias de Morelos A.C.
CГіmo citar: Autor, C., Orquestando un equipo de fГєtbol. Parte 1: Las bases matemГЎticas (2018, 21 de Septiembre ) Orquestando un equipo de fГєtbol. Parte 1: Las bases matemГЎticas. Conogasi, Conocimiento para la vida. Fecha de consulta: Julio 11, 2025
Esta obra estГЎ disponible bajo una licencia de Creative Commons Reconocimiento-No Comercial Compartir Igual 4.0
Deja un comentario
SГ© el primero en comentar!